Одной из больших проблем для систем управления автономными автомобилями-роботами является густой туман, который препятствует работе многочисленных камер и датчиков. И ученые из Стэнфордского университета, взяв за основу широко применяемую технологию лазерного сканирования LIDAR, дополнили ее рядом высокоэффективных программных алгоритмов и получили систему, способную видеть объекты, скрытые за пеленой густого тумана.
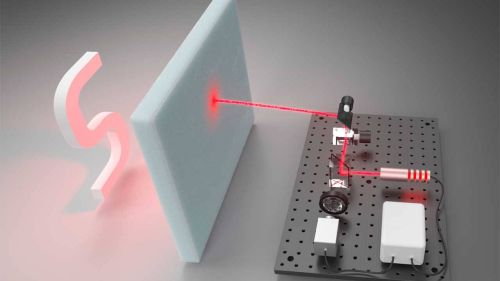
Разработанная учеными система способна восстановить трехмерные изображения скрытых объектов при помощи анализа движения частиц света - фотонов. Для этого в составе системы имеется лазер, постоянно сканирующий пространство. Часть фотонов лазерного луча рассеивается туманом, но другой, меньшей, части все же удается добраться объекта и отразиться от его поверхности.
Часть отраженных фотонов также рассеивается туманом и лишь считанным единицам из них удается добраться до сверхвысокочувствительного датчика, способного регистрировать время прибытия и другие параметры единичных фотонов. Используя эти крупицы исходной информации, сложные программные алгоритмы выполняют процедуры фильтрации, аппроксимации и другие, которые позволяют воссоздать трехмерное изображение объекта, скрытого за пеленой тумана.
Во время испытаний стэнфордская система успешно восстановила изображение объекта, помещенного за листом пены толщиной в 1 дюйм (2.54 сантиметра), которая имитировала более толстый слой весьма густого тумана. Качества полученного трехмерного изображения было достаточно для определения формы объекта и расстояния до него. Другими словами, система управления автомобилем-роботом получила бы в таких условиях всю информацию, необходимую для того, чтобы избежать аварийной ситуации.
Cистема, созданная Стэнфордскими учеными, является далеко не первой подобной лазерной системой. Однако, за счет некоторых тонкостей, ученым удалось обойти ряд ограничений, которые препятствуют работе других систем, некоторые из которых способны за один проход сканировать туман только на определенную глубину, к примеру.
И в заключении следует отметить, что данная система может быть использована не только в технологиях управления движением автомобилей-роботов и беспилотных летательных аппаратов. Еще одной потенциальной областью применения системы "противотуманного компьютерного видения" являются исследования Земли и других планет со спутников, двигающихся по низкой орбите. В таком случае система может обеспечить сканирование поверхности планеты сквозь облачный слой или мутную атмосферу, наполненную частичками пыли, к примеру.















