Группа исследователей из Лаборатории органической робототехники Корнуэльского университета создала робота-рыбу с мягким телом, которая приводится в действие искусственной "электрической кровью". Эта "кровь" является не только источником электроэнергии, она также выступает в роли рабочей жидкости гидравлической системы, обеспечивающей движение робота. Такой "биовдохновленный" подход позволяет сгладить в некоторой степени основную проблему небольших автономных роботов - конфликт массы и количества имеющейся в распоряжении робота энергии.
На аккумуляторные батареи, являющиеся источником энергии в большинстве случаев, приходится большая часть веса роботов. А большой вес влияет отрицательным образом на маневренность, скорость и другие параметры. И, если удается заставить один из компонентов робототехнической системы выполнять одновременно две функции, одной из которых является хранение энергии, то острота вышеописанной проблемы снижается в два раза.
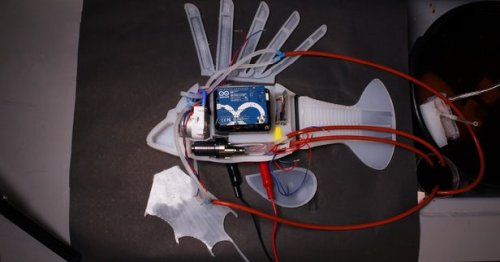
Прототипом для робота является достаточно известная рыба-лев (lionfish), которая имеет массу других официальных и неофициальных названий. Тело робота, длиной 40 сантиметров, изготовлено из формованного силикона. Внутри робота есть два миниатюрных гидравлических насоса, каждый из которых приводится в действие потоковой цинковой батареей. Первый насос обеспечивает циркуляцию жидкости по телу робота, а второй - по ее плавникам. Работа этих насосов обеспечивает движение тела, которое заставляет двигаться робота вперед со скоростью приблизительно полутора длин его тела в минуту.
Использование гидравлики в роботах с мягким телом является уже далеко не новой идеей. Новизна здесь заключается в том, что гидравлическая жидкость выступает также в качестве источника энергии, при этом, запаса энергии в "электрической крови" робота достаточно для его непрерывного функционирования в течение 36 часов.
"Позже мы планируем превратить в энергетическую систему и другие компоненты конструкции роботов" - пишут исследователи, - "К сожалению, эффективно сделать это у нас пока получилось лишь по отношению к одному из компонентов гидравлической системы. Однако, результат стоил затраченных усилий, робот получил такой запас хода, который потребовал бы в других условиях наличия большого количества литиевых аккумуляторов".
Достижения, подобные данному, являются шагами на пути к созданию более эффективных, универсальных автономных плавающих и подводных роботов, которые смогут выполнять работу по исследованию подводного мира, осмотру подводных трубопроводов, кабелей и т.п. А робот с мягким и гибким телом могут действовать, нанося минимальный ущерб чувствительной подводной среде коралловых рифов, к примеру, и в других местах, где роботы с жестким телом могут вызвать нарушение хрупкого экологического баланса.