Большинство из существующих роботов предназначено для выполнения определенной работы и их конструкция не предусматривает возможности изменений или обладает адаптивностью в очень узких пределах. Однако инженеры из Политехнического института и университета штата Вирджиния (Virginia Tech) создали условно мягкого робота, лишенного таких недостатков, который может изменять свою форму, приспосабливая ее для езды по поверхности, полета или плавания на воде. А ключевым моментом всего этого является металлический сплав, способный переключаться из твердого в жидкое состояние и наоборот, который заполняет собой поры ключевых деталей конструкции робота, изготовленных из эластичного полимера.
Создание такого робота-морфа началось с поисков материала, который способен менять свою форму, фиксировать ее и удерживать в течение длительного времени. Основой этого материала является толстая пленка эластомера, на поверхности которой созданы треугольники, напоминающие элементы киригами. Сквозь основу этого эластомера проходит множество полостей, которые формируют сеть, заполненную металлическим сплавом с очень низкой температурой плавления. Так же в состав этого материала включены нагреватели, изготовленные из специальной тонкой проволоки.
Такой получившийся сложный композитный материал является основой, на которую устанавливаются приводы, двигатели, батареи и электроника, которая помимо всего прочего, также управляет изменениями формы робота.
Идея заключается в том, что после включения нагревателей металлический сплав становится жидким и телу робота можно придать любую желаемую форму. Отключение нагревателей приводит к быстрому охлаждению жидкого металла, он кристаллизуется и конструкция робота обретает жесткостью. Нагрев металлического сплава осуществляется до температуры в 60 градусов Цельсия, время фиксации формы робота составляет порядка одной десятой секунды, а эластичное тело способно выдерживать практически бесконечное количество циклов изменения формы.
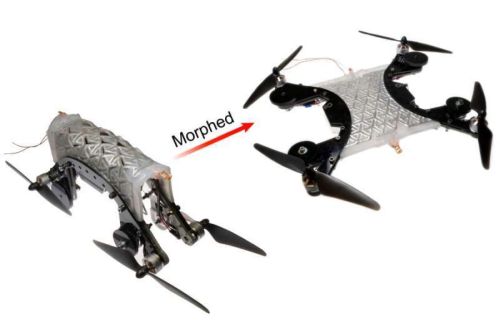
Для демонстрации возможностей нового материала исследователи создали робота, которые имеет небольшие колеса и может передвигаться по поверхности в экономичном режиме. Но, в случае появления непреодолимого препятствия, робот меняет свою форму и превращается в обычный летающий квадрокоптер. Второй экспериментальный образец является чем-то вроде миниатюрной подводной лодки, способной погрузиться под воду, достичь дна водоема, "вырастить" совок, зачерпнуть им образцы груза и подняться на поверхность.
"Разработанный нами материал может стать основой многофункциональных роботов" - рассказывает Эдвард Дж. Баррон III (Edward J. Barron III), ведущий исследователь, - "Материал достаточно прочен для того, чтобы выдержать нагрузки, возникающие при работе двигателей и приводов, но когда это необходимо, он становится мягким, позволяя роботу адаптироваться к изменениям окружающей среды".















