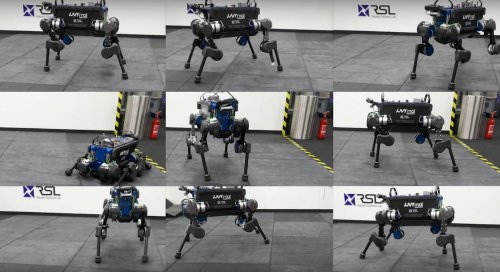
Одной из самых тяжелых проблем, с которыми сталкиваются разработчики четвероногих и двуногих роботов являются действия этих роботов, позволяющих им подняться после падения. Ранее это реализовывалось при помощи разветвленных сложных алгоритмов, определяющих последовательность действий в той или иной ситуации, но исследователи из Швейцарии пошли несколько другим путем, который оказался гораздо более эффективным. Они создали искусственную нейронную сеть и обучили ее на примере виртуального робота, действовавшего в среде компьютерного моделирования. И после того, как эта нейронная сеть была перенесена уже в реального робота, это робот стал более гибким в принятии решений и более адаптивным, успешно выпутываясь из самых тяжелых ситуаций приблизительно в 25 раз быстрее, чем ему удавалось делать то же самое ранее.
Робот, который получил систему управления на базе искусственного интеллекта, является роботом ANYmal, разработанным в свое время специалистами Лаборатории автоматизированных систем Швейцарского федерального технологического института (Swiss Federal Institute of Technology, ETH Zurich). Этот робот во многом похож на робота SpotMini известной компании Boston Dynamics, он имеет высоту чуть более 60 сантиметров, его конечности составлены из 12 суставов и приводятся в действие электрическими приводами.
Использование компьютерного моделирования для обучения системы искусственного интеллекта, со слов исследователей, имеет целый ряд неоспоримых преимуществ. Во-первых, такое обучение является менее дорогостоящим, ведь даже в самых сложных ситуациях отсутствует возможность нанесения повреждений достаточно дорогостоящей машине. Помимо этого, процесс обучения был "разогнан" в тысячу раз по сравнению со скоростью обучения реального робота в реальном мире, при этом, для проведения математического моделирования даже не потребовался самый слабый из суперкомпьютеров, со всеми задачами справился традиционный персональный компьютер с весьма средними показателями производительности.
Что касается робота, он начал более точно следовать инструкциям в реальном мире сразу же после получения нейронной сети, обученной в виртуальной реальности. Это даже позволило ему установить свой новый рекорд скорости движения, который составил 1.5 метра в секунду. И если раньше робот мог только покорно падать после толчка, то теперь он научился активно сопротивляться, если нападающий на него человек настроен слишком агрессивно и злоупотребляет "терпением" робота.
"Роботы, передвигающиеся на нескольких конечностях, могут в будущем спасать людей, пробираясь сквозь завалы, поднимаясь по лестницам и проходя через подземные туннели" - рассказывает Джемин Хвангбо (Jemin Hwangbo), - "И если вам доведется столкнуться с таким роботом, то придержите свою агрессию и не начинайте пинать его ногами, как это делается в весьма популярных видеороликах. Ведь от достаточно развитого робота можно будет и схлопотать в ответ…".